Mickey Li
Senior Research Fellow in Robotics, AI and LIDAR Software Engineering
University College London
Bristol Robotics Laboratory
University of Bristol
University of The West of England
Biography
Mickey is a Robotics and Autonomous systems senior research fellow with the Deparment of Civil, Environment and Geomatic Engineering at University College London working on transitioning and developing research photogrammetry and surveying metrology systems for deployment in aerospace manufacturing. This primarily revolves around investigating the viability of ROS2 for industrial use and implementing an infrastructure for large scale sensor networks for multiple different tasks, including equipment tracking and high accuracy multi-vehicle ground and aerial robot inspection and measurment.
He completed his PhD in 2023 at Bristol Robotics Laboratory (BRL) and the University of Bristol on the FARSCOPE CDT program supervised by Professor Arthur Richards and sponsored by the Toshiba Bristol Research and Innovation Laboratory. The PhD focused on failure-aware multi-drone algorithms for coverage path planning for application such as building inspection, in particular how guarantees can be provided despite vehicle failures. During this time he also developed a portable development and deployment infrastructure for multi-UAV experimentation for the BRL Flight Arena inspired by advances in cloud computing. He graudated in 2018 with a first from Joint Mathematics and Computer Science at Imperial College London with a masters project supervised by Dr Aldo Faisal on Real Time Semantic Segmentation with SLAM for Gaze Intention Decoding.
In addition to research, he is passionate when it comes to public engagement of robotics research having previously developed games for the UK Festival of Robotics, and is an avid advocate for better software engineering education throughout all engineering discplines. Outside of research, he is an active pianist, having previously performed Rach 2 with live orchestra, and an avid saxophonist.
Download my industrial resumé.
Download my industrial CV.
Download my academic CV.
- UAVs
- Multi-Robot Systems
- Optimisation
- Artificial Intelligence
- Distributed Sensing
- Real World Robotics
- Robotics Software Development and Deployment
FARSCOPE PhD in Robotics and Autonomous Systems, 2023
Bristol Robotics Laboratory, University of Bristol, University of the West of England, UK
MEng Joint Mathematics and Computer Science, 2018
Imperial College, London, UK
Skills
Experience
Transitioning and developing research photogrammetry and surveying metrology systems for deployment in aerospace manufacturing. This primarily revolves around investigating the viability of ROS2 for industrial use and implementing an infrastructure for large scale sensor networks for multiple different tasks, including equipment tracking and high accuracy multi-vehicle ground and aerial robot inspection and measurment.
DELTA Project with line managers Prof. Stuart Robston, Prof Jan Boehm and Assistant Prof Vijay Pawar.
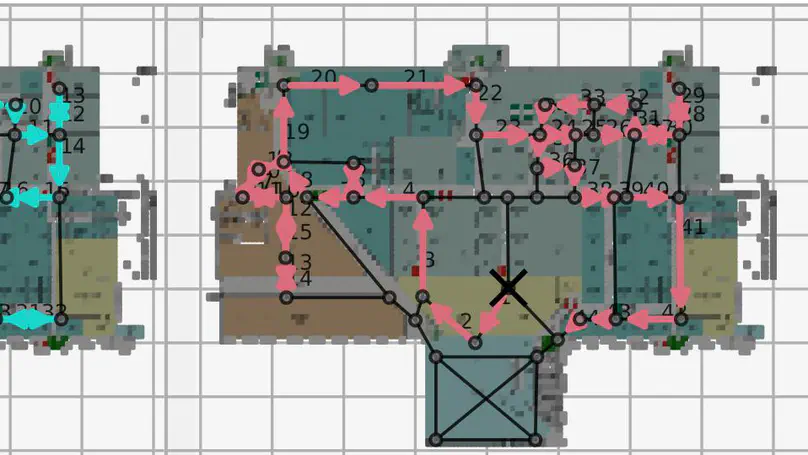
My research is focused on investigating the practical use of multi-drone and multi-agent systems. In particular, how the whole system can remain robust and reliable in the prescence of failures. The specific focus is on developing failure-aware multi-drone algorithms for coverage path planning for use in structural and infrastructure inspection. This work includes the following:
- Proposed a novel probabilistic framework for evaluation the reliability of a path plan called Reliability-Aware Multi-Agent Coverage Path Planning (RA-MCPP)
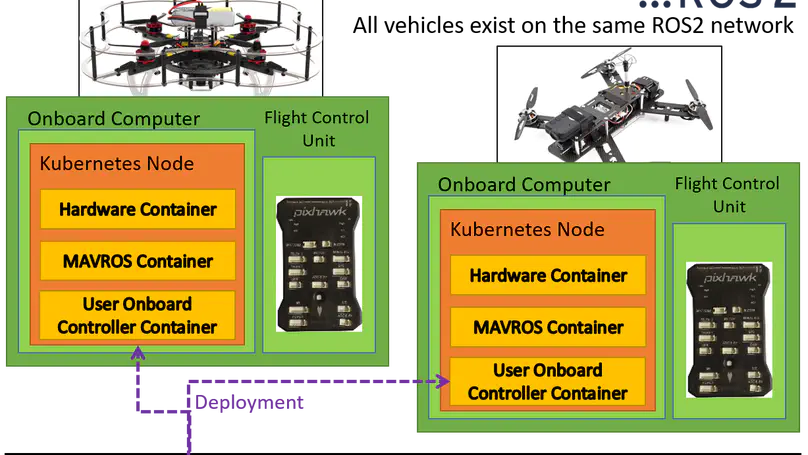
- Designed and developed software infrastructure for multi-drone flight known as Starling using ROS2, PX4, Docker and Kubernetes.
- Investigating Online Reliabity-Aware Coverage Path Planning and its feasibility.
Supervised by Professor Arthur Richards (Bristol) and Professor Mahesh Sooriyabandara (Tohisba). Funded by ESPRC FASRCOPE Center for Doctoral Training in robotics and autonomous systems.
Responsibile for the development, generation and testing of a novel drone vertiport approach and depature topologies and operations. Collaboration with with Hirad Gourdazi, supervised by Prof. Arthur Richards.
- Software and hardware integration of a GUI mavlink, mavlink-router and mavp2p for safe multi-drone flight.
- Investigating optimisation of optimal spatial topologies.
Responsible for providing teaching and support of the MSc Aerial Robotics MSc Programme.
- Delivered lectures on the developed Starling system and ran weekly software tutorials.
- Supervised 7 MSc students for their final year projects on multipel different topics including path planning, marsupial robot control and bluetooth communications.
Responsibile for the development and testing of a novel motion planning algorithm on a real drone. I worked closely with Dr Saurabh Upadhyay on re-implementing his fast motion planner for UAVs. I extended his algorithm to a receeding horizon formulation to enable dynamic reaction and obstacle avoidance.
- Re-implemnted from MATLAB to RUST for greater performance on a Raspberry Pi.
- Integrated the motion planner into a deployable container for the Starling system in the BRL Flight Arena.
- Performed simulated and real testing of the motion planner on real UAVs.
Developed and publically released an educational game submission for the UK-RAS 2021 Robotics Week. I lead a team of 7 volunteer postgraduate students through the planning and development of the RoC-Ex: Robotics Cave Explorer game. The game is designed to teach children and teenagers how a robot senses the world and its environment through the exploration of a cave.
As the voluntary project manager, I suggested and pushed for methods to ensure that we would complete in time. This included organising 2 weekend “hackathon sessions” in which we all sat together to develop the game. As a developer, my responsibility was to integrate the models and missions into the Godot game engine, and to setup deployment and delivery of the game.
The game was successfully released to the general public with currently over 600 hits. RoC-Ex is still available online here. and more details are available in the RoC-Ex project post
Tasked to explore and analyse a large distributed dataset. I introduced the use of cluster computing with Apache Spark and build analysis tools with Spark an Pandas for data analysis
I then implemented a novel recommendation engine model known as Collaborative Deep Learning in Distributed Tensorflow.





Recent & Upcoming Talks
Featured Publications
Recent Publications
Contact
- mickey "dot" li "at" ucl dot ac dot uk
- UCL at Here East, 8-9 East Bay Lane, Queen Elizabeth Olympic Park, London, London E15 2GW
- UCL HereEast at HereEast Complex Stratford