Abstract
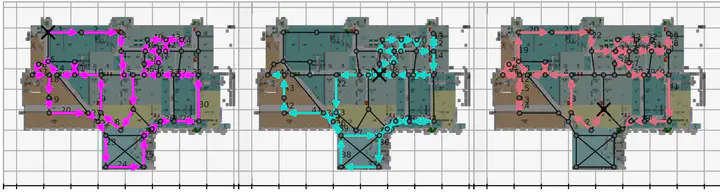
Graceful degradation is a potential advantage of Multi-Robot Systems over Single-Robot Systems. In aerial robotics applications, such as infrastructure inspection, this trait is desirable as it would improve mission reliability despite the use of failure-prone low-cost drones. The Reliability-Aware Multi-Agent Coverage Path Planning (RA-MCPP) problem finds path plans for each robot to maximise the probability of mission completion by a given deadline. This paper proposes a path planner for RA-MCPP formulated in continuous time, enabling more complex realistic environments to be considered. The proposed method (i) extends a reliability evaluation framework to evaluate the Probability of Completion metric on asynchronous strategies on non-unit lattice graph environments, and (ii) introduces a greedy-genetic meta-heuristic optimisation method as a scalable and accurate RA-MCPP solver. This method is shown to provide plans with higher reliability when compared with existing approaches in three real inspection scenarios.